伪微分反馈控制科普中国-科学百科 2018-04-25 作者:李岳阳 |
Phalen提出的伪微分反馈控制(Pesudo-Drivative Feedback Control——PDF),与常规的PID控制有某些相同之处,但较好地克服了PID控制的微分突变、启动回绕等缺陷,具有响应快、跟踪准确等特点。其输出比较平滑,极少出现失控和振荡现象,抗干扰性能良好,算法较容易实现,需要调试的参数很少,而且对于大多数系统来说,是一种最优控制。与一些复杂的控制算法相比,伪微分反馈控制算法显得相当简便而可靠。因此,对精密级的CNC位置伺服系统而言,伪微分反馈控制是非常合适的一种控制算法1。
伪微分反馈控制策略
伪微分反馈控制策略如图1所示,其反馈环节为 ,并引入积分环节
,并引入积分环节 来确保系统的闭环响应中不存在静态误差。系统外反馈回路中的
来确保系统的闭环响应中不存在静态误差。系统外反馈回路中的 用来调节系统输出的幅值。由于伪微分反馈控制的前向通路是由单一的积分环节驱动,而微分环节是对较为平滑的输出信号作用的,所以并不存在传统PID控制中的微分突变现象,有着较好的控制效果。
用来调节系统输出的幅值。由于伪微分反馈控制的前向通路是由单一的积分环节驱动,而微分环节是对较为平滑的输出信号作用的,所以并不存在传统PID控制中的微分突变现象,有着较好的控制效果。
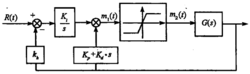
为了保证进入对象环节的信号 不至于过大,在受控对象前还加入了一个饱和限幅的非线性环节。由实验结果看,尽管做了这样的假设,设计出来的PDF控制器仍然是很令人满意的1。
不至于过大,在受控对象前还加入了一个饱和限幅的非线性环节。由实验结果看,尽管做了这样的假设,设计出来的PDF控制器仍然是很令人满意的1。
PDF调节器参数整定
如果输入的信号足够小,使得该信号在后面的饱和非线性环节中的线性段内工作,我们则可将系统等效为一般的线性系统。而在超精密数控加工中,由于插补间隔已经极小化,可以认为输入的信号幅值是足够小的。
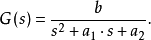
假设受控对象环节为二阶线性传递函数
对上述模型如果想保证所有的闭环极点都为负实数,且能获得最快速的闭环响应,则PDF调节器参数算式为
 式中,
式中, ,
, 为系统调节时间,
为系统调节时间, 可以根据实际情况确定。
可以根据实际情况确定。
在实际应用中,系统的模型可能是高阶的,因此需要对模型进行一些处理。模型降阶技术现已比较成熟,通过采用模型降阶方法,可以获得合适的系统降阶模型,并由此确定PDF调节器的参数。在闭环控制下,基于模型降阶处理设计出来的PDF调节器的行为仍然是令人满意的。这也从一个侧面说明了PDF调节器对系统模型具有很强的鲁棒性。
由于PDF调节器对各项参数的变化不是非常敏感,通常根据系统模型获得的调节器参数就可以获得良好的控制效果。
综上所述,得到PDF控制器参数为: 。此外,由于PDF控制器的参数比较少,因此在
。此外,由于PDF控制器的参数比较少,因此在
没有获得系统模型的情况下,也可以通过凑试法获得合适的PDF控制器参数。图2给出了PDF控制下的闭环阶跃响应和方波跟踪的仿真曲线。
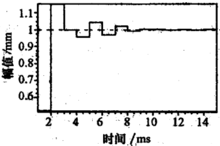
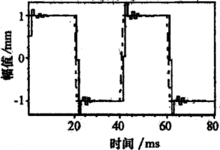
PDF控制曲线跟踪仿真
与PID控制的仿真曲线对比可以看出,PDF控制的响应时间有所减少,但超调量却有所增加,在稳定后,PDF控制的振荡幅度远远小于PID控制。这正好说明了PDF控制响应快、跟踪准确的特点1。
本词条内容贡献者为:
李岳阳 - 副教授 - 江南大学
责任编辑:科普云
 科普中国APP
科普中国APP
 科普中国微信
科普中国微信
 科普中国微博
科普中国微博







最新文章
-
为何太阳系所有行星都在同一平面上旋转?
新浪科技 2021-09-29
-
我国学者揭示早期宇宙星际间重元素起源之谜
中国科学报 2021-09-29
-
比“胖五”更能扛!我国新一代载人运载火箭要来了
科技日报 2021-09-29
-
5G演进已开始,6G研究正进行
光明日报 2021-09-28
-
“早期暗能量”或让宇宙年轻10亿岁
科技日报 2021-09-28
-
5G、大数据、人工智能,看看现代交通的创新元素
新华网 2021-09-28




